
벽면 등반형 복합 드론(CAROS) 개발Development of a wall-climbing drone


 기술 및 산업의 발달로 도시화는 전 세계적인 추세가 되며, 이 도시들의 중심부에는 고층 및 초고층 구조물들이 들어선다. 이 구조물들의 유지보수는 이제 벽면을 등반하는 드론(CAROS)에 의해서 수행된다. CAROS는 자유자재로 자세를 변환하여 구조물의 표면에 밀착하여, 구조물의 모든 부위를 검사한다. 이 초고층 구조물은 화재가 발생할 경우 큰 인명피해 및 재산피해로 이어질 가능성이 크지만, CAROS는 저층, 고층에 상관없이 화재 현장에 투입되어 신속하게 정찰 및 진압 임무를 수행한다. 또한 화재로 구조물이 손상되어 통과가 불가능한 곳은 자세를 변환하여 벽면을 등반해 신속하게 빠져나간다. 이 로봇은 화재의 발원지를 신속히 파악하여 화재의 확산을 막는다. 동시에 위험에 처한 인명을 찾아내고, 이 정보를 본부와 무선 통신한다. 그 결과, 소방관들은 보다 빠르게 사람의 위치를 찾아낼 수 있고, 이를 바탕으로 인명 구조율은 획기적으로 상승한다.
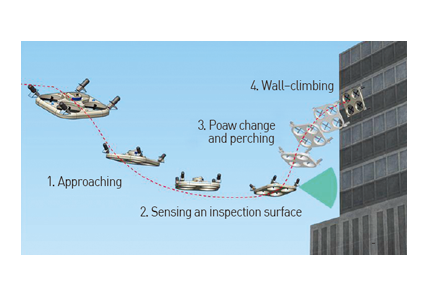
기술 및 산업의 발달로 도시화는 전 세계적인 추세가 되며, 이 도시들의 중심부에는 고층 및 초고층 구조물들이 들어선다. 이 구조물들의 유지보수는 이제 벽면을 등반하는 드론(CAROS)에 의해서 수행된다. CAROS는 자유자재로 자세를 변환하여 구조물의 표면에 밀착하여, 구조물의 모든 부위를 검사한다. 이 초고층 구조물은 화재가 발생할 경우 큰 인명피해 및 재산피해로 이어질 가능성이 크지만, CAROS는 저층, 고층에 상관없이 화재 현장에 투입되어 신속하게 정찰 및 진압 임무를 수행한다. 또한 화재로 구조물이 손상되어 통과가 불가능한 곳은 자세를 변환하여 벽면을 등반해 신속하게 빠져나간다. 이 로봇은 화재의 발원지를 신속히 파악하여 화재의 확산을 막는다. 동시에 위험에 처한 인명을 찾아내고, 이 정보를 본부와 무선 통신한다. 그 결과, 소방관들은 보다 빠르게 사람의 위치를 찾아낼 수 있고, 이를 바탕으로 인명 구조율은 획기적으로 상승한다.CAROS (Climbing Aerial RObot System) is a drone-type wall-climbing robot that can be used to inspect the surfaces of buildings and superstructures by changing its configuration and attaching itself to all types of surfaces. It is an efficient means of cleaning and conducting maintenance on buildings. CAROS has been extended to FAROS (Fireproof Aerial RObot System) that has been designed to enter large buildings and quickly gather information in the event of a fire. Such data will assist firefighters in their rescue efforts.
- Description
- 한국과학기술원 : 건설및환경공학과
- Publisher
- 한국과학기술원
- Issue Date
- 2015
- Language
- kor
- Description
KAIST 2015 대표 연구성과 10선
- Link
- https://archives.kaist.ac.kr/research.jsp?year=2015&view=view08
https://archives.kaist.ac.kr/eng/research.jsp?year=2015&view=view08
- Appears in Collection
- 2015 KAIST 대표 연구성과 10선

Items in DSpace are protected by copyright, with all rights reserved, unless otherwise indicated.